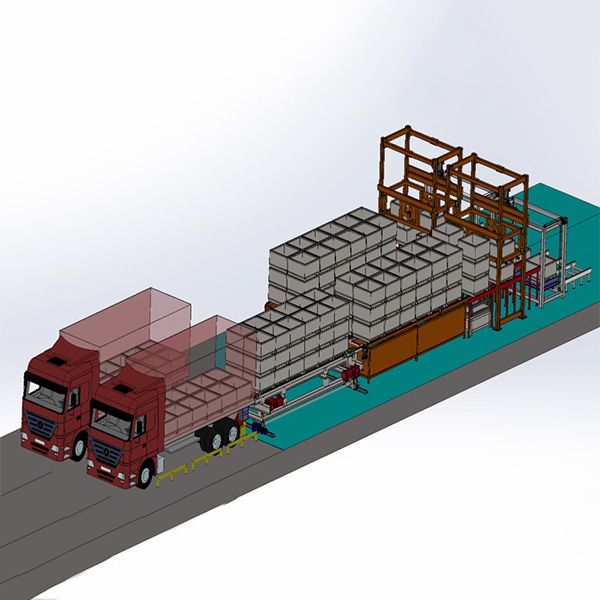
Эта система обычно состоит из основных модулей, таких как конвейерная линия, интеллектуальный блок распознавания, индивидуально настроенный подъемный робот и гибкие захваты. Когда поддоны, полностью загруженные товарами, транспортируются штабелером к терминалу отгрузки, система использует технологию визуального распознавания для определения формы, размера и положения товаров на поддоне. Затем промышленные роботы, в соответствии с заранее установленной программой, приводят в действие захваты (такие как механические клешни и присоски) для автоматического захвата и перемещения товаров в коробках или на поддонах и укладывают их упорядоченным и рациональным образом в соответствии с пространством внутри грузовика и последовательностью загрузки.
Применение этой системы направлено на замену традиционного ручного режима загрузки, освобождая сотрудников от высокоинтенсивного, повторяющегося ручного труда. Благодаря автоматизированным и интеллектуальным операциям погрузки и разгрузки она помогает снизить повреждения товаров, которые могут быть вызваны ручной работой, и стремится обеспечить согласованность и стабильность рабочего процесса. В то же время система может быть интегрирована с программным обеспечением верхнего уровня управления для автоматического получения заказов на погрузку, обеспечивая техническую поддержку для оптимизации эффективности отгрузки и реализации цифрового управления последним этапом логистики.
Эта система подходит для отраслей с большими объемами отгрузки и высокими требованиями к эффективности погрузки, таких как товары повседневного спроса, продукты питания и химикаты.
Популярные ключевые слова:Кран-штабелер, Робот-тележка